伺服驅(qū)動系統(tǒng)的種類及其特性
2025-04-27【按使用能量分類】
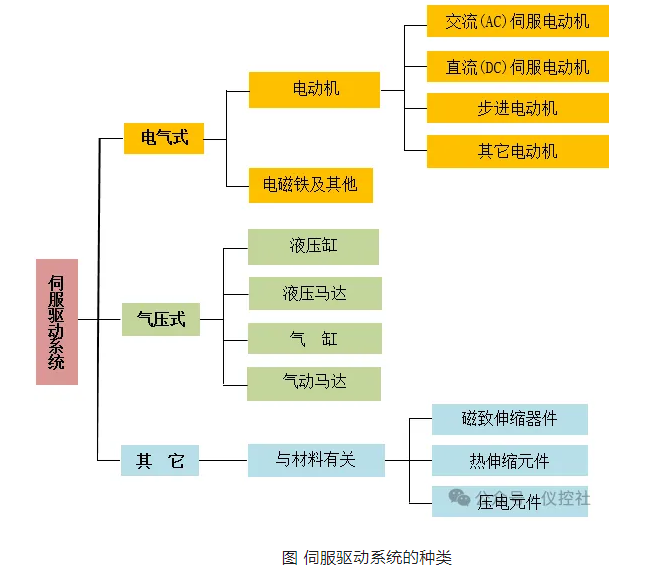
根據(jù)使用能量的不同,可以分為電氣式,、液壓式和氣壓式等幾種類型,,如圖所示。
【按控制原理分類】
伺服驅(qū)動系統(tǒng)按控制原理的不同還可以分為開環(huán),、全閉環(huán)和半閉環(huán)等伺服系統(tǒng),。
1,、開環(huán)伺服系統(tǒng)
開環(huán)伺服系統(tǒng)中沒有檢測反饋裝置。圖1所示的開環(huán)數(shù)控進(jìn)給系統(tǒng)由數(shù)控裝置發(fā)出脈沖指令,,經(jīng)過脈沖分配和功率放大后,,驅(qū)動步進(jìn)電機旋轉(zhuǎn)。由于沒有檢測反饋,,工作臺的位移精度主要取決于步進(jìn)電機和傳動件的累積誤差,。
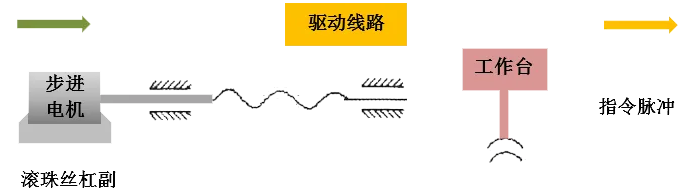
圖1開環(huán)伺服系統(tǒng)
開環(huán)伺服系統(tǒng)的精度較低,速度受限,,但結(jié)構(gòu)簡單,、成本低、調(diào)整和維修較方便,,另外由于被控量不以任何形式反饋到輸入端,所以其工作穩(wěn)定,、可靠,,因此在一些精度、速度要求不很高的場合,,如線切割機,、辦公自動化設(shè)備中得到了廣泛應(yīng)用。
2,、全閉環(huán)伺服系統(tǒng)
全閉環(huán)伺服系統(tǒng)中有檢測反饋裝置,。圖2所示的全閉環(huán)伺服系統(tǒng)工作臺上安裝的位置檢測裝置,將工作臺的直線位移轉(zhuǎn)換成電信號,,得到工作臺位移的偏差值,,由伺服電機驅(qū)動工作臺向偏差減小的方向移動,實現(xiàn)高精度位置控制,。
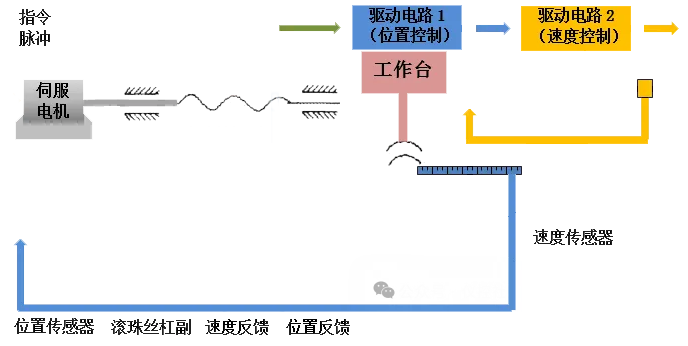
圖2全閉環(huán)伺服系統(tǒng)
3,、半閉環(huán)伺服系統(tǒng)
半閉環(huán)伺服系統(tǒng)中檢測元件位于系統(tǒng)傳動鏈的中間。圖3所示的半閉環(huán)伺服系統(tǒng)中工作臺的位置通過電機上的傳感器間接獲得,,測量角位移比測量線位移容易,,并可在傳動鏈的任何轉(zhuǎn)動部位進(jìn)行角位移的測量和反饋。
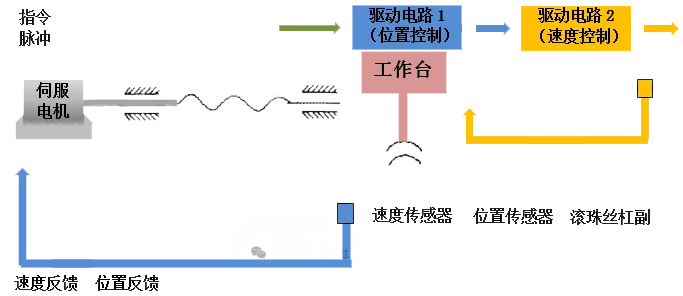
圖3半閉環(huán)伺服系統(tǒng)
半閉環(huán)伺服系統(tǒng)部分傳動鏈在系統(tǒng)閉環(huán)之外,,精度比全閉環(huán)的稍差,,但系統(tǒng)調(diào)試比較容易、穩(wěn)定性好,,具有較高的性價比,,被廣泛應(yīng)用于各種機電一體化設(shè)備。
來源:儀控社
(版權(quán)歸原作者或機構(gòu)所有)